- Graduate Field Affiliations
- Aerospace Engineering
- Computer Science
- Electrical and Computer Engineering
- Mechanical Engineering
- Systems Engineering
Biography
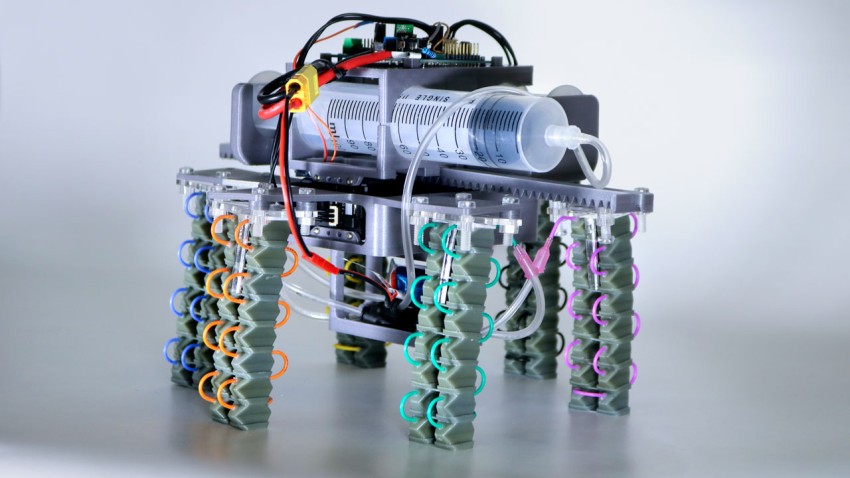
Natural swarms, such as ants, bees, and termites, exhibit sophisticated colony level behaviors with remarkably scalable and error tolerant properties. Their evolutionary success stems from more than just intelligent individuals, it hinges on their morphology, their physical interactions, and the way they shape and leverage their environment. Petersen’s research explores how the same principles can be leveraged to achieve advanced autonomy in robot collectives, through hardware and software co-development, and by integrating the shared environment into the design process. Current research themes span collective robotic construction, human swarm interaction, soft robot collectives, biological swarms, and bio-hybrid collectives.
Kirstin did her postdoctoral work with Director Sitti at the Max Planck Institute for Intelligent Systems 2014-2016 and became a fellow with the Max Planck ETH Center for Learning Systems in 2015. Her thesis was completed in 2014 with Professor Nagpal at Harvard University and the Wyss Institute for Biologically Inspired Engineering. She completed a masters in Computer Systems Engineering with Professor Hallam at the University of Southern Denmark in 2008, and a bachelor in electro-technical engineering with Odense University College of Engineering in 2005.
Research Interests
- Robotics and Autonomy
- Artificial Intelligence
- Sensors and Actuators
- Rapid Prototyping
- Computer Architecture
- Computer Engineering
Select Publications
-
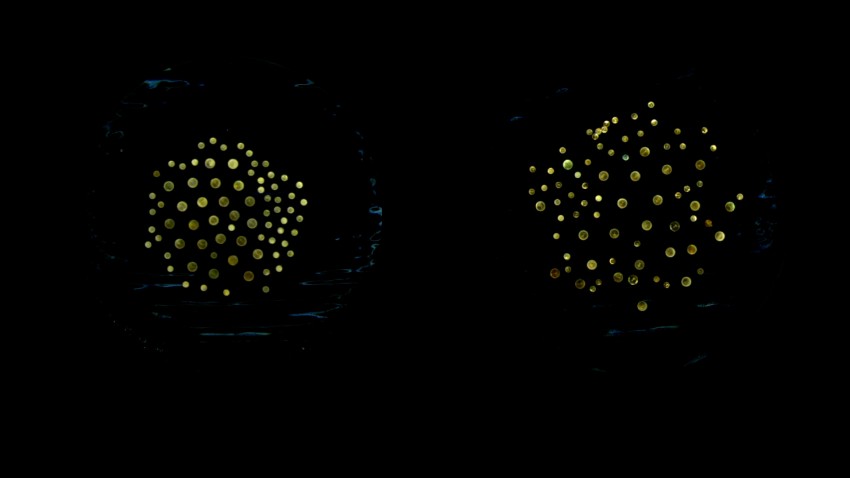
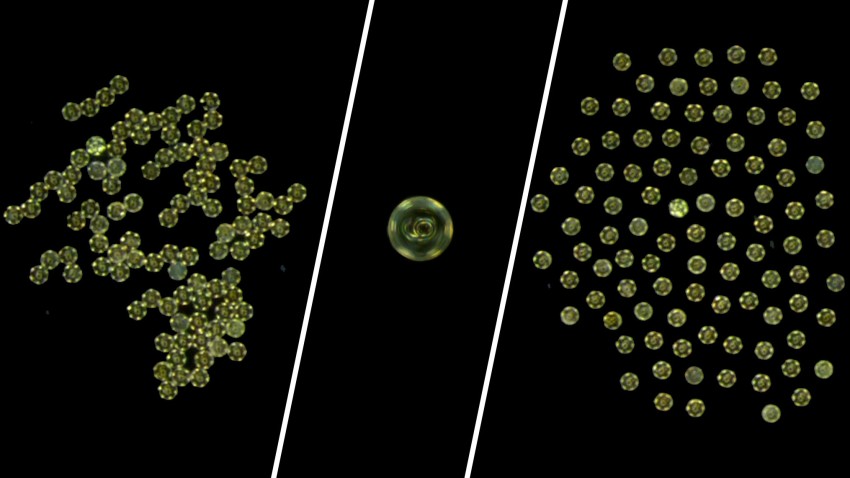
Michael L. Smith, Nils Napp, Kirstin Petersen. 2021. “Imperfect comb construction reveals the architectural abilities of honeybees.” Proceedings of the National Academy of Sciences 118(31):e2103605118.
-
Hines, L., K. Petersen, G Z. Lum, M Sitti. 2016. “Soft Actuators for Small-Scale Robotics.” Advanced Materials, 1521-4095.
-
Hines, L., K. Petersen, M Sitti. 2016. “Inflated Soft Actuators with Reversible Stable Deformations.” Advanced Materials 28 (19): 3690-3696.
-
Petersen, Kirstin, P. Bardunias, N. Napp, J. Werfel, R. Nagpal, S. Turner. 2015. “Arrestant property of recently manipulated soil on Macrotermes michaelseni as determined through visual tracking and automatic labeling of individual termite behaviors.” Journal of Behavioral Processes, 116: 8-11.
-
Werfel, J., Kirstin Petersen, R. Nagpal. 2014. “Designing collective behavior in a termite-inspired robot construction team.” Science 343(6172): 754-758.
Select Awards and Honors
- Douglas Whitney ’61 Excellence in Teaching Award, College of Engineering, Cornell University 2022
- Packard Fellowship for Science and Engineering, the David and Lucile Packard Foundation 2019
- Elisabeth Schiemann Kolleg Fellow with the Max Planck Society 2016
- Max Planck Fellowship for Postdoctoral work, 10/22/2014-07/01/2016 2014
- Research ranked 4th in Science Magazine's Top 10 Scientific Achievements of 2014, Science Magazine 2014
Education
- B. S., Electro-technical Engineering, Odense University College of Engineering 2006
- M. S., Computer Systems Engineering, University of Southern Denmark 2008
- Ph.D., Computer Science, Harvard University 2014