- Graduate Field Affiliations
- Aerospace Engineering
- Fiber Science and Apparel Design
- Materials Science and Engineering
- Mechanical Engineering
- Systems Engineering
- Theoretical and Applied Mechanics
Biography
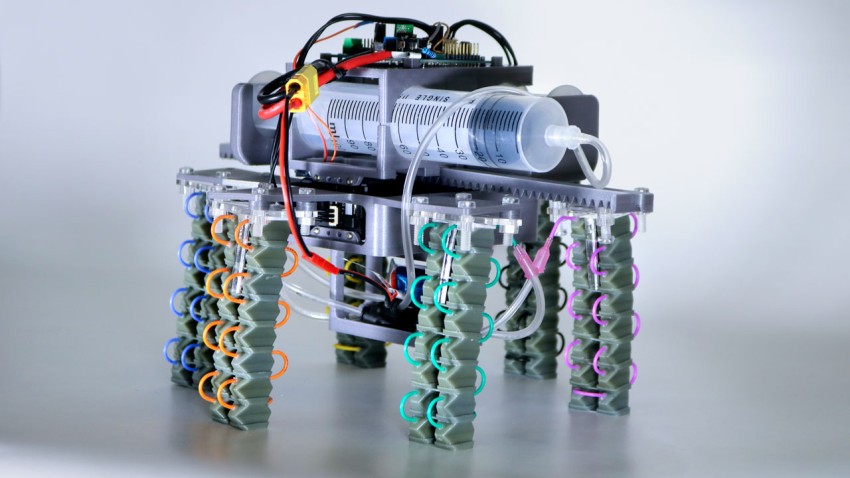
Rob Shepherd received his B.S. (2002) and Ph.D. (2010) in Material Science at the University of Illinois where his research focused on developing polymeric and colloidal suspensions as ‘inks’ for 3D printers. He also fabricated microfluidic devices to synthesize single micron to millimeter scale parts (e.g., glass and silicon microgears). Concurrently to performing this research, he received his M.B.A. (2009) at U of I and started a company, worked with several other startups, and gained significant experience with the details of market research, financials, accounting issues, and legal aspects of entrepreneurship. In 2010, he continued his education as a post-doctoral fellow at Harvard University in George Whitesides’s research group in the Department of Chemistry and Chemical Biology. In this group, he developed pneumatic actuators in soft elastomers that took the form of a machine capable of moving in multiple gaits: walking and undulating. These actuators have also been used for low-cost manipulators, and in concert with a microfluidic system for biomimetic camouflage & display.
Research Interests
Dr. Shepherd is interested in developing disruptive manufacturing technologies (e.g., 3D printing, replica molding, microfluidics, etc.) and functional materials to enable new devices and user experiences. He is particularly interested in simultaneously increasing the speed, dimensionality, resolution, and materials capability of free-form fabrication techniques, and developing soft actuators that mimic biological functions, but not necessarily their mechanisms: These interests are synergistic and will, perhaps, enable more efficient and life-like machines.
- Robotics and Autonomy
- Materials Design
- Advanced Manufacturing and Materials
Teaching Interests
Select Publications
-
Morin, S A., Robert Shepherd, S. Kwok, A A. Stokes, A. Nemiroski, G M Whitesides. 2012. “Camouflage and Display for Soft Machines.” Science 337 (6096): 828-832.
-
Shepherd, Robert, P. Panda, Z. Bao, J A. Lweis, K H. Sandhage, T A. Hatton, P S Doyle. 2008. “Stop-Flow Lithography of Colloidal, Glass, and Silicon Microcomponents.” Advanced Materials 20 (24): 4734-4739.
-
Shepherd, Robert, T. Sabuwala, J C. Conrad, G. Gioia, J A Lewis. 2012. “The Structural Evolution of Cuboidal Granular Media.” Soft Matter 8 (17): 4795-4801.
-
Shepherd, Robert, F. Ilievski, W. Choi, S A. Morin, A A. Stokes, A D. Mazzeo, X. Chen, M. Wang, G M Whitesides. 2011. “Multigait Soft Robot.” PNAS 108 (51): 20400-20403.
-
Ilievski, F., A D. Mazzeo, Robert Shepherd, X. Chen, G M Whitesides. 2011. “Soft Robotics for Chemists.” Angewandte Chemie-International Edition 50 (8): 1890-1895.
Select Awards and Honors
- Senior Member, National Academy of Inventors (NAI) 2022
- Young Investigator Program, Office of Naval Research 2016
- College of Engineering Teaching & Advising Award, Cornell University 2016
- Extreme Mechanics Letters Young Investigator Award 2016
- National Academy of Engineering FOE Fellow 2016
- National Academy of Sciences KAVLI Fellow 2016
Education
- B.S., Material Science & Engineering, University of Illinois 2002
- M.B.A., General Management, University of Illinois 2009
- Ph.D., Material Science & Engineering, University of Illinois 2010